- Sunteți aici:
-
Acasă

-
Regulamente
-
Humanoid Challenge
-
RO
- Regulamente
- Detalii
- Regulamente
- Accesări: 532
Mission Challenge LEGO
The goal of this category is to build a robot at the competition and conduct a designated mission on the day of match.
This category is meant for young robotics enthusiasts that want to compete with other participants at a beginner to medium level. The age limit for this category is 16 years.
General specifications
The robot and the solution for the mission must be solved only using a robot built out of Lego Mindstorms devices (RCX, NXT, EV3 or Spike Prime).
Under the rules of the game, teams will have to build at the competition an autonomous robot, that will have to accomplish the mission according to the mission specifications received at the start of the competition while also respecting the specifications in the regulations.
1. Notification
We realize that there are other variations to the rules for Mission Challenge, while there are many similarities between other variants the official Robotics Championship rules posted on the website will be used, for this competition we ask that participants to read and be familiar with this particular rule set at the time of the competition, in order to avoid surprises.
This category is inspired by the games organized by the International Robot Olympiad Committee (IROC). (see more at https://www.iroc.org/2018-rules-1 )
2. Team
2.1. A “team” is composed of one to five participants who will build a robot at the event. Each team should also have one adult present with the team. One adult can represent multiple teams if they wish.
2.2. The robot must be an autonomous robot constructed by themselves at the competition site to regulation and mission specifications. This robot category does not permit prebuilt robots, kits will be inspected before the start of the category. There will be a predefined time for adjustments and changes to the robots and their programming during the event.
2.3. Each team / robot will receive a check-in number and should have a unique name or identity to be easily recognizable by spectators and officials when they are on the field and when they score. The identification label will be placed on the robot during the technical inspection after the building of the robot is done.
2.4. Each team that has built a robot for this category will have equal chances and number of tries. During the trials, only two members can approach the track, the other team members must follow the trial from the public or remain in the participants area.
3. Robot Construction
3.1. All participants must make their own robot on the competition day, starting from the moment they receive the mission specifications. All participants will start the building phase at the same time only on the referee’s command.
3.2. Size and platform of the playfield will be announced on the day of the trial. The mission which participant should conduct will be announced by the referee or organizer on the day of competition.
3.2. The participating robots may only be composed of official Lego parts (for example LEGO Mindstorm kits based on RCX, NXT, EV3 or Spike Prime), which cannot be held together by any means other than the standard Lego construction methods (no tape, glue, stickers, etc.). No homemade sensors, multiplexers, or modifications to Lego elements are allowed. No modification to Lego parts by gluing, cutting or melting is allowed.
3.3. Motors with and without rotation sensors are allowed, and any other sensors manufactured by Lego may be used. No “made for Lego” third party sensors or other components are permitted for this tournament.
3.4. Numbers and type of motors will be announced according to the mission given on the competition day. The number won’t exceed the number in the table below.
| Type of motor | Maximum |
| Continuous Revolution Motors | 4 |
| Servo motor | 2 |
| Encoder motor | 2 |
| Stepping motor | 2 |
3.5. Numbers and type of sensors will be announced according to the mission given on the competition day. The number won’t exceed the number in the table below.
| Sensor type | Maximum |
| IR sensors | 4 |
| Ultra-sonic sensors | 2 |
| Touch sensors | 2 |
| Color sensors | 1 |
3.6. The size limitations of the robot will be announced on the day of competition.
3.7. Before starting the game, the referee will describe the mission to a representative of each team. (Ex. Build a robot that can carry a 500g weight for over 1m wall, can dive and pick up the following treasure from the bottom of the water pool, can hit a ball in order to move it to a specific place.)
3.8. The referee will also give a description of the scoring formula used for this event. (Ex. The robot must carry three metal balls across the bridge as quickly as possible. If a robot loses a ball, then a 60 second penalty will be added to the time.)
3.9. The referee will also announce any special restrictions or rules that may be in effect during the event. (Ex. Participants must use no more than three rubber bands.)
3.10. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of technical inspection, and once check-in takes place, the robot or its programming may no longer be modified only in the specific time announced by the referee. Robot battery should also be sufficiently charged once the robot is checked in.
3.11. Participants are required to self check the size of the robot while manufacturing and practicing to ensure there will be no issues at the technical inspection.
3.12. Except the starting point, robots must move autonomously by the program and it cannot be operated by any outer interference for remote control.
3.13. Optionally the robot can be started via a button on the robot or using the official LEGO IR remote control, as shown in Figure 1. No Bluetooth or other wireless control of the robot on the field is permitted unless specifically stated in the mission objective. If the LEGO programmable brick has integrated communication modules they will not be used during this competition unless specifically stated in the mission objective. The referee may inspect the code at any moment during the competition.
.

Figure 1. LEGO IR remote control.
3.14. It is encouraged that robots be decorated or themed with Lego parts.
3.15. Robots should work with an independent electric power supply. No charging cable or external batteries are permitted. The only batteries the robot uses should be the ones that fit in the standard programmable LEGO brick.
3.14. It is encouraged that robots be decorated or themed with Lego parts.
3.15. Robots should work with an independent electric power supply. No charging cable or external batteries are permitted. The only batteries the robot uses should be the ones that fit in the standard programmable LEGO brick.
4. Robot limitations
4.1. Size and weight limitations will be announced on the competition day.
4.2. Height is not restricted.
4.4. When the referee announces a start/stop signal, the robot must act accordingly.
4.5. At the startup the robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Components with a mass of less than 5 grams will not result in loss.
4.6. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown on the track or opponents.
4.7. Sticky substances to improve traction are not allowed. Wheels and other components of the robot that are in contact with the ring should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be checked at the technical inspection stage and may be rechecked at the referee's request at any time during the competition.
4.8. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.9. Robots who will not follow these rules will be disqualified.
4.10. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / surrounding environment and track. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
4.11. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect, are strictly forbidden.
5. Programming
5.1. The robot must be autonomous. No Bluetooth or other wireless control of the robot on the field is permitted unless specifically stated in the mission objective.
5.2. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / according to the mission specifications. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the trials. Each team will have to pass the technical inspection stage in order to be able to participate further with the robot in the competition. After approval, all teams will necessarily remain in the participant area and wait for instructions from the referee.
The stages of the technical approval process are:
6.1. Checking the size of the robot by placing it on a predefined rectangle that has the maximum size limitation announced in the mission specification. Participants cannot give any objection toward the referee.
6.2. The mass of the robot will be checked by the means of a digital scale. The maximum value of the scales shall be mass announced in the mission specifications.
6.3. If the size or weight of the robot exceeds the mission specifications, participants will be given 1 minute to modify their robot in front of the judge, on a designated desk. If participants fail to fit the standard size, the team can be disqualified.
6.4. The wheels of the robot and other parts that are in contact with the track must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.4. The means of starting the robot will be checked.
6.5. The robot will no longer be retained after approval.
7. The Track
Official Playfield: Size, arrangement and composition of the playfield will be announced on the day of the trial.
7.1. The inside of the track is defined as a white surface with black lines. Other color lines and drawn shapes on the track may be present.
7.2. The playing surface dimensions are not known until the competition day.
7.3. Objects and obstacles may be present on the playing track.
7.4. Bridges, inclined surfaces, and ramps may be part of the track.
8. Conduct of the contest
8.1. Robots will be divided into groups according to the number of participants.
8.2. Construction and practice time given will be at least 2 hours and it will be announced on the competition day.
8.3. Production and Practice time are available until the end of announced practice time; however, they’re not allowed to practice before their seats have been assigned.
8.4. After the end of the production and practice time is announced by the referee, participants must stop their robot and follow the instructions of the referee and staff.
8.5. After technical inspection approval all teams must remain in the competition area.
8.6. Preparation of the game: All participants must place the robot and be ready for the referee's instruction.
8.7. During the trial the time recorded will be stored and displayed on the projector/website. After the first trial there will be repair time.
8.8. The 1st run will begin after the construction and practice time.
8.9. Please stand by the game area after the game. When participants finish their 1st trial, they have to line up and watch all participants’ games until the end of that trial, giving every participant equal time and opportunities.
8.10. Repair Time after the end of 1st run, all participants have 30 minutes to modify their robot and practice.
8.11. The 2nd Run Right after the repair time, the 2nd Run will begin.
8.12. Stand by after the game. If a participant finishes his/her 2nd trial, they will go back to their seats.
8.13. During the contest a team is entitled to 2 interruptions for reprogramming during trials, 5 minutes each (2 interruptions are allowed in the whole game).
8.14. Other breaks are only allowed for emergency mechanical problems and only with the referee's agreement, a maximum of 5 minutes each. This rule is applied only when a trial is taking place. Besides trial’s time, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the trial.
8.15. The participants can choose their own path or sequence of moves on the playing track sequence as long as the start/stop line and mission specifications are respected.
8.16. The lines on the track are for guiding the robot’s orientation. Robots are not obligated to keep following a line if they are not required to achieve the mission’s completion.
8.8. The decisions of the referees must be unanimous and are final, and their challenge leads to disqualification from the trial.
9. Playing the trial
9.1. The Robot’s initial position. At the instructions of the referees, the two teams approach the track to place the robot on the track surface.
9.2. The Start, Stop, Interruption or Continuation of the trial is announced by the referee.
9.4. The start is ordered by the referee in each round. After the start is announced the robot must start immediately without delay.
9.5. If the participant can’t start within 5 counts from the referee's signal, it will be declared as ‘Miss Start’ and they have two more chances to restart for this missed start.
9.6. If the participant starts the robot before the referee’s signal, it is declared as ‘False start’ and they have only one more chance to restart.
9.7. Each team has the right for two restarts in total per trial.
9.8. A trial will be played for a maximum of 2 minutes. It will begin at the referee's command. Robots that couldn’t complete the missions within 2 minutes, will have all points earned within 2 minutes aggregated as the final score for that trial.
9.9. If the participant completes the mission within the time limit, the trial will be finished and the time and points will be registered.
9.10. If the robot doesn’t move, the referee will count 10 seconds and if the robot still can not move, will call it a stop and count the points participants earned until the robot stopped.
9.11. During the trial, the referee can declare a TKO (Technical knockout) without 10 counts when the referee judges that the robot can’t drive properly anymore. (Ex. robot had been stopped over the structure and obstacle, robot drive settled zone repeatedly)
10. The score
10.1 A participant scores points according to the number of successes. The points per each mission will be announced on the competition day via the mission specification paper.
10.2. Ranking is done taking into account factors such as Mission points, time record, penalties and so on.
10.3. Time record is based on the measuring instruments or referee’s timer. (If you are declared as a TKO or Robot is stopped by the referee, the time record will not be accepted as the final score.)
10.4. The final score considered will be the best score out of the 1st and 2nd run.
10.5. The standard of the scoring system is based on quantitative standards: timekeeping, distance record and the number of moving targets, in some special occasions it might include a knock‐out competition or even a subjective evaluation.
10.6. Order of priority of the result Ex) Scores > Time record > Compare the time result.
10.7. Order of priority according to rounds If result is same, winner will be decided after comparing the result of another rounds.
10.8. Order of priority according to Tie-Breaker Better score out of 1st and 2nd round will be accepted as final point, but if tied, the player with better results in the 1st round will win the game.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a trial, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the trial is won by the opposing robot and the defective robot team can continue the repairs until the next trial in which they participate and in that case being supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the trial when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. Failure to continue a trial. When the game can no longer continue due to injury of the competitor or damage to the robot, the competitor who caused the injury or robot's damage or failure will lose the trial. The only robot to robot damage is permitted during official trials. If one can not decide who is to blame, the one who will ask for the trial to be stopped will be declared defeated.
11.6. Rematches
During the trial if an expected situation occurs, such as blackout or breakdown of a measuring instrument, the referee can decide to do a rematch.
12. Player Restrictions
12.1. When teams are called to the track for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Only one team member may enter the trial area to place and take the robot off the track.
During the trial, if the participant violates the rule or interrupts the trial, it will be ended and the result will not be admitted.
12.4. Robot Touch During the trial, if participants touch the robot without judge and supervisor
authorization, it will be declared robot touch and disqualified.
12.5. Repair during the trial During the trial, additional, remove, exchange, changing the toll is prohibited but during the standby, if the participants has additional battery then the team will be disqualified. 5-7-3. Sensor tuning Before the trial begins, if participants try to tune the sensor, will be disqualified
12.6. Disobey of seat allocation If participants practice or play the game at the playfield that they’re not assigned, participants will be disqualified. 12.7. False Start If participants conduct ‘False Start’ twice, participants will be disqualified.
12.8. Miss Start If participants conduct ‘Miss Start’ three times, participants will be disqualified.
14. The Winner
The Champion will be the robot with the most points achieved throughout the game.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of trials. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
- Detalii
- Regulamente
- Accesări: 697
1. General information
The matches will take place between two teams, each team having one or more members. During the battles only two team members from each team may approach the ring; The operator and the assistant will enter the game area, the other team members must watch from the audience. According to the rules, the teams will compete in a Dohyo (sumo ring) with an autonomous robot that they have constructed themselves to the specifications in Section 3 and 4.
The match starts at the referee's command. The match is over when one of the two robots get 2 points "Yuhkoh". The referee determines the winner of the match. After the match the operator and the assistant will go to the area designated for the challenge and wait for the next game.
2. Team
2.1. A “team” is composed of one to five students who have built a robot for this event.
2.2. The humanoid robot must be an autonomous robot constructed by themselves prior to the competition to the specifications below. This robot category is not a workshop where you may build robots after arrival. There will be limited time for adjustments and changes to the robots and their programming during the event.
2.3. Each team/robot will be assigned a number on check-in and should have a unique name or identity to be easily recognized by spectators and officials when on the field and when scoring.
2.4. Matches will take place between two teams that have built a humanoid robot for this category. During the battles, only two members can approach the ring, the other team members must follow the match from the public.
2.5. One person can be an operator for a maximum of 2 robots.
2.6. If two robots of the same team advance to quarters/semifinals/finals and play one against the other, they must play the match, without demanding that one of them advance without play, or to demand to arrange the matches or the opponents.
3. Robot Construction
3.1. A robot must fit within a square with the side length of 20 cm (200 mm). Maximum height for the robot is 50 cm (500 mm).
3.2. The total mass of a robot at the start of a match must be under 3kg (3000g).
3.3. The robot must be a two legged walking humanoid biped that must shift its center of gravity to maintain its balance when walking.
3.4. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of registration, and once check-in takes place, the robot or its programming may no longer be modified. Robot battery should also be sufficiently charged once the robot is checked in.
3.5. Any type of electronics are permitted, there is no limitation to kits, module brand or home made components as long as they do not present safety risks.
3.6. All robots must be autonomous. Any control mechanisms can be employed, as long as all components are contained within the robot and the mechanism does not interact with an external control system (human, machine, or otherwise). The only exception being the start/stop command.
3.7. Any robot design is allowed, if not subject to the limitations of section 2.2.
4. Robot limitations
4.1. The robot must stand still for 5 seconds before the start of the match. After 5 second the robot can move.
4.2. The robot can be started from a remote or from a button placed on the robot.
4.3. The robot must have 2 arms. Each arm extended length shall not exceed the extended leg length.
4.4. The robot must have a head.
4.5. When walking, one foot must lift off the floor, while the other foot is balancing the robot.
4.6. When walking, the foot that balances the robot must have a knee-joint angle greater than 90 degrees. At any point if this is not the case, the robot will not be considered walking.
4.7. The feet can be of any shape and form as long as all of the following are maintained:
A. The robot’s foot is defined as the part of the robot that is contacting the surface of the arena (ground).
B. The maximum length (size) of the foot must be less than 50% of the length of the extended robot’s leg. The leg length is defined as the distance between where the robot's foot touches the ground and the axis that connects the leg to the upper body of the robot.
C. The maximum length of the foot must be less than 20 cm (200 mm).
4.8. When a robot is standing or walking, a rectangular outline around the left and right foot shall not overlap.
4.9. The startup robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Components with a mass of less than 5 grams will not result in loss of the match.
4.10. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown to the opponent.
4.11. Devices that throw objects to the opponent are not allowed.
4.12. Sticky substances to improve traction are not allowed. Wheels and other components of the robot that are in contact with the ring should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be screened at the approval stage and may be rechecked at the referee's request at any time during the competition.
4.13. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.14. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
4.15. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect, are strictly forbidden.
4.16. There are not allowed components of the robot that can destroy the playing area. Do not use components intended to destroy the opponent's robot. The thrusts and the normal blows specific for a sumo match, are not considered intentions for destruction.
4.17. Parts that could break or damage the ring are not allowed. Do not use parts that are intended to damage the opponent’s robot or its operator. Normal pushes and bangs are not considered intent to damage.
4.18. Any devices that throw flames are not allowed.
4.19. Any devices that throw objects towards the opponent are not allowed.
4.20. Robots who will not follow these rules will be disqualified.
5. Programming
5.1. The robot must be autonomous.
5.2 All robots must be autonomous. The autonomous robot movements will attack the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the competition. Each team will have to pass the technical inspection stage in order to be able to participate with the robot in the competition. After approval, all teams will necessarily remain in the competition room.
The stages of the technical approval process are:
6.1. Verify the size of the robot by placing a 20.3 cm x 20.3 cm (203mm x 203mm) bottomless box/frame over the robot. The height of the robot will be measured maximum 50.3 cm (503 mm)
6.2. Weigh the robot on a digital scale. The maximum value of the scales shall be 3005 kg.
6.3. Check the operation of the 5 second delay when starting.
6.4 It will be checked if the operator and assistant have the protective gear.
6.5. The feet of the robot and other parts that are in contact with the sumo ring must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.6.It will be checked if the number exists on the outer casing of the robot.
6.7. The robot will no longer be retained after approval.
6.8. After approval the first 4 teams will remain in the waiting area, near the game area. The rest of the teams will return to the area assigned for them.
7. Dohyo (ring of sumo)
7.1. The inside of the ring is defined as the surrounding black area, but also includes the white line. Any surface outside the ring will be called the outside of the ring.
7.2. The playing surface is defined as a 3 mm thick black disc with a diameter of 154 cm (1504mm).
7.3. A white band is on the outside of the black area and has a width of 5 cm (50mm).
7.4. A 3.5% tolerance is allowed in the construction of the contest surface.
7.5. Starting Lines (Shikiri-Sen) brown color 20x2 cm (200x20 mm), as seen in figure 1.
7.6. There is a safe space outside the ring. This space can be any color, it can be of any material and can have any shape. This area with the ring at its center will be called the ring area.
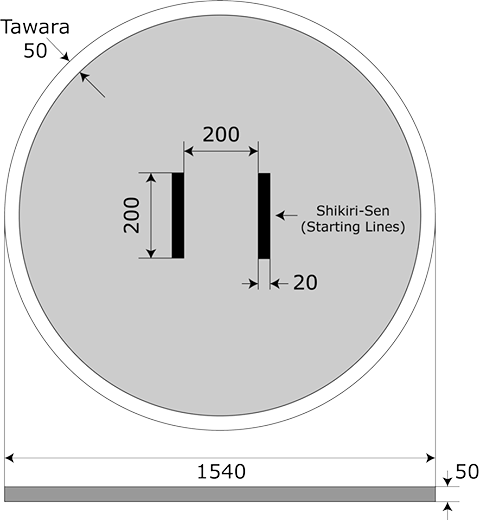
Figure 1. Dimensions of the dohyo (sumo ring)
8. Conduct of the contest
8.1. Robots will be divided into groups according to the number of participants. The competition will take place in the group / quarter / semifinal / final system to allow as many rounds of play as possible for each robot.
8.2. Each match takes place in the best of 3 rounds and will be supervised by 2 referees (1 main referee and 1 assistant), except for the finals where the match is played in the best of 5 rounds. The decisions of the referees must be unanimous and are final, and their challenge leads to disqualification from the match.
8.3. During the contest a team is entitled to 2 interruptions for reprogramming during matches, 5 minutes each (2 interruptions in the contest).
8.4. Other breaks are only allowed for mechanical problems and only with the referee's agreement of maximum 5 minutes each. This rule is applied only when a match is taking place. Besides matches, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the match.
8.5. After approval all teams remain in the competition area. Teams can only leave the room for repairs. If a team leaves the competition room, it must return within the specified time by the referee. If the robot does not appear on the first call, it loses the match.
8.6. The order of the robots in the groups will be made random, it will be made after the official opening of the competition, and will be available on the website for all the participants. The ones that pass the groups will play quarter/semi finals/finals.
If the number of participants will not be enough for the groups the competition will be played from the beginning using the pyramidal system. The position in the pyramid will be random.
8.7. After the homologation the teams, which will follow at the start, will remain at the competition area, in the waiting area. The teams will leave this area only if the referee agrees, or only for repairs and they must return in the time set by the referee. If the team doesn’t return at the first call, they will lose the match.
8.8. Each team has the responsibility to follow the starting grid (schedule), displayed on the website and on the projector.
8.9. If a team is called to play and does not arrive in 5 minutes the robot is disqualified.
8.10. For the operator and the assistant it is mandatory to wear gloves and protective eyewear. The protective gear is mandatory to be worn in the game area and during the matches. The protective gear will be checked at homologation.
8.11. The missing of the protective gear entirely or partially will can result in losing a ”Yuhkoh” point to the opposite team, or the team can be disqualified.
8.12. The match may be stopped by the judge if the robots do not touch each other for more than 15 seconds and no clear will to fight is observable.
9. Playing the match
9.1. Robot start position. At the instructions of the referees, the two teams approach the ring to place the robots on the contest surface. The operators will place the robots at the same time on the ring. The Judge will give the signal. After placing, the robots may not be moved anymore. After placing the robot on the ring, the operator and/or the assistant must retreat to the marked safe area.
9.2. Any part of the robots must be placed behind the Shikiri-Sen (staring lines) as highlighted in green in Figure 2. The robot shall not go over the starting line toward the opponent.
The robot should be placed on and within the extended lines vertically from the both edges of Shikiri-Sen (starting line). The referee will check if the robots are placed ok. If the placement is not correct, the robot positioning will be made again.
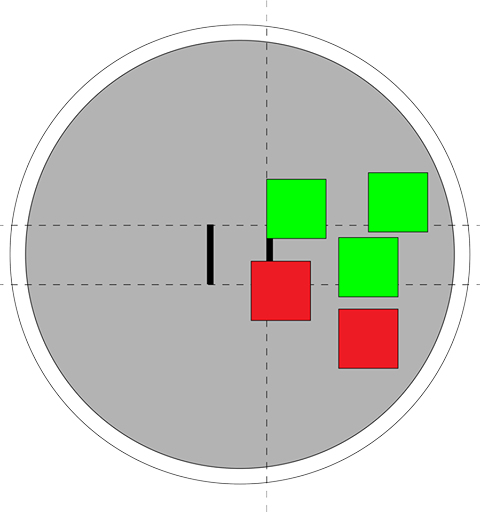
Figure 2. Placing the robots on the battle ring.
9.3. The Start, Stop, Interruption or Continuation of the match is announced by the referee.
9.4. A match will be played for a maximum of 3 minutes. It will begin and end at the referee's command.
9.5. End of the match. When the referee announces the end of the match, the two teams are allowed to lift the robots from the ring.
9.6. A match consists of 3 rounds, each of which lasts for a maximum of 3 minutes, with the possibility of time extension by the referees.
9.7. Extension: an additional match, if requested by the referee, will take up to 3 minutes.
9.8. A team receives a "Yuhkoh" point when they win a round.
9.9. The first team that wins two rounds or receives the first two points "Yuhkoh" until the end of the time limit will win the match.
9.10. If the time limit is reached before a team receives two "Yuhkoh" points the team with the most points will win the match. (for example 1-0 points out of 3 matches).
9.11. If a match is not won by any team during the limit, an additional round will be played. After all options have been exhausted, the winner of the match may be decided by referees by drawing lots or other criteria set by the arbitration panel.
9.12. If one of the two robots does not start, a restart will occur. If the rest of the robot does not leave, the match will be won by the moving robot.
9.13. After a match is over, the teams must return to the area reserved for them.
9.14. If the robots get stuck, the rules from point 6.1 will be applied.
10. The score
10.1. A knockdown occurs when a robot is knocked down by its opponent. 2 points shall be added to the opponents score.
10.2. A slipdown occurs when a robot falls on its own. 1 point shall be added to the opponents score.
10.3. A ringout occurs when any part of a robot contacts the surface outside the arena.3 points shall be added to the opponents score.
10.4. A knockout occurs when:
A. A robot fails to get up within a 10 second countdown.
B. A robot is unable to move or walk when commanded by a judge within a 10 second countdown.
10.5. When a knockout has been declared the match is immediately ended, and the match shall be awarded to the opponent.
10.6. The team of the robot shall be given permission by the judge to place their robot face down within the arena without further penalty provided it can get up within a 10 second countdown.
10.7. The match is stopped and the round is redone when:
A. Both robots move without making any progress, stop (at the same time), or stop for 10 seconds without touching.
B. If both robots touch at the same time the outer surface on which the ring is placed and it can not be determined which robot has touched the first exterior, the round will be replayed.
10.8. If one of the two robots doesn’t start there will be one restart.
A.If at restart the same robot doesn’t start, the point will be won by the robot that moves.
10.9. The robots are entangled or orbiting each other with no perceivable progress for 10 seconds there will be one restart.
A.If at restart the situation is repeating, the winner will be the robot that moves more and shows the willing to fight.
B. If at restart the situation is repeating, the robot that moves faster and attack more will be the winner of the round.
10.10. Both robots move, without making progress, or stop (at the exact same time) and stay stopped for 5 seconds without touching each other. However, if one robot stops its movement first, after 5 seconds it will be declared as not having the will to fight. In this case the opponent shall receive a “Yuhkoh” point, even if the opponent also stops. If both robots are moving and it isn't clear if progress is being made or not, the judge can extend the time limit up to 30 seconds
10.11. If both robots touch the outside of the ring at about the same time, and it can not be determined which touched first, a rematch is called.
10.12. In the case the winner can't be declared in any of the above situations, there will be a special rule: A bottle will be placed in the center of the Dohyo and the first robot that touches it is declared the winner.
10.13. When determining the winner falls to the arbitrators, after exhausting the Humanoid Sumo competition criteria, the following considerations are considered:
A. Quality of robot construction and programming.
B. Penalty points accumulated during the match.
C. Team attitude during the match.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a match, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the match is won by the opposing robot and the defective robot team can continue the repairs until the next match in which they participate and in that case being supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the match when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. Failure to continue a match. When the game can no longer continue due to injury of the competitor or damage to the robot, the competitor who caused the injury or robot's damage or failure will lose the match. The only robot to robot damage is permitted during official matches. If one can not decide who is to blame, the one who will ask for the match to be stopped will be declared defeated.
11.6. If there are any modifications made to the robot after homologation, the robot must again pass the homologation stage.
12. Player Restrictions
12.1. When teams are called to the dohyo for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Only one team member may enter the match area to place and take the robot of the dohyo.
12.4. The competitors are forbidden to enter the ring during the match, unless the referee stops the match after the grant of a " Yuhkoh ".
12.5. The competitors are forbidden from demanding to stop the match without appropriate reasons.
13. Judging
13.1. No objections shall be declared against the referees / judges' decisions.
13.2. The lead person of a team can present objections to the organizing committee, before the match is over, if there are any doubts in the exercising of these rules. If there are no Committee members present, the objection can be presented to the judge before the match is over.
13.3. The decisions of the referee must be unanimous and are final; questioning these decisions leads to disqualification.
14. Championship
The Champion will be the robot with the most most "Yuhkoh" points.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
- Detalii
- Regulamente
- Accesări: 3121
LEGO Sumo
Basic principle are based on the robot sumo rules but construction of the robot may only be comprised of official Lego parts. This category is meant for young robotics enthusiasts that want to compete with other participants at a beginner level. The age limit for this category is 16 years.
General specifications
The goal of the LEGO Sumo category is to make a Sumo robot using Lego Mindstorms devices (RCX, NXT, EV3 or Spike Prime).
Under the rules of the game, teams will compete on a Dohyo (sumo ring) with an autonomous robot, it’s own construction according to the specifications in the regulations.
1. Notification
We realize that there are many variations to the rules for LEGO Sumo Robot; the official Robotics Championship rules posted on the website will be used for this competition and we ask that participants to read and be familiar with this particular rule set at the time of the competition, in order to avoid surprises.
2. Team
2.1. A “team” is composed of one to five students who have built a robot for this event. Each team should also have one adult present with the team. One adult can represent multiple teams if they wish.
2.2. The robot must be an autonomous robot constructed by themselves prior to the competition to the specifications below. This robot category is not a workshop where you may build robots after arrival. There will be limited time for adjustments and changes to the robots and their programming during the event.
2.3. Each team / robot will receive a check-in number and should have a unique name or identity to be easily recognizable by spectators and officials when they are on the field and when they score.
2.4. Each team/robot will be assigned a number on check-in and should have a unique name or identity to be easily recognized by spectators and officials when on the field and when scoring.
2.5. Matches will take place between two teams that have built a robot for this category. During the battles, only one member can approach the ring, the other team members must follow the match from the public.
3. Robot Construction
3.1. The racing robot may only be composed of official Lego parts (for example LEGO Mindstorm kits based on RCX, NXT, EV3 or Spike Prime) , which cannot be held together by any means other than the standard Lego construction methods (no tape, glue, stickers, etc.). No homemade sensors, multiplexers, or modifications to Lego elements are allowed. No modification to Lego parts by gluing, cutting or melting is allowed.
3.2. TWO motors with rotation sensors are allowed, and any other sensors manufactured by Lego may be used. No “made for Lego” third party sensors are permitted for this tournament.
3.4. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of registration, and once check-in takes place, the robot or its programming may no longer be modified. Robot battery should also be sufficiently charged once the robot is checked in.
3.5. The robot must be able to start using the official LEGO IR remote control, as shown in Figure 1, or via a Bluetooth connection. Start and stop commands are only performed by the referee. Other functions other than starting and stopping controlled via the Bluetooth connection are forbidden and the robot code may be inspected by the referee at any moment during the competition.
3.6. It is encouraged that robots be decorated or themed with Lego parts.
4. Robot limitations
4.1. When started on the Dohyo, the robot can’t be more than 15.3x15.3 cm.
4.2. Height is not restricted.
4.3. The maximum mass of the robot shall not exceed 1,505 kg.
4.4. When the referee sends a start/stop signal, the robot must act accordingly.
4.5. The startup robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Components with a mass of less than 5 grams will not result in loss of the match.
4.6. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown to the opponent.
4.7. Devices that throw objects to the opponent are not allowed.
4.7. Sticky substances to improve traction are not allowed. Wheels and other components of the robot that are in contact with the ring should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be screened at the approval stage and may be rechecked at the referee's request at any time during the competition.
4.8. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.9. Robots who will not follow these rules will be disqualified.
4.10. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
4.11. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect.
5. Programming
5.1. The robot must be autonomous. Bluetooth or other wireless control of the robot on the field is forbidden with the exception of the communication start/stop command.
5.2 All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the competition. Each team will have to pass the technical inspection stage in order to be able to participate with the robot in the competition. After approval, all teams will necessarily remain in the competition room or area.
The stages of the technical approval process are:
6.1. Verify the size of the robot by placing a 15.3 x 15.3 cm.
6.2. Weigh the robot on a digital scale. The maximum value of the scales shall be 1.505 kg.
6.3. The wheels of the robot and other parts that are in contact with the track must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.4. Check the operation of the IR sensor or Bluetooth function for both when starting and stopping the robot.
6.5. The robot will no longer be retained after approval.
7. Dohyo (ring of sumo)
7.1. The inside of the ring is defined as the surrounding black area, but also includes the white line. Any surface outside the ring will be called the outside of the ring.
7.2. The playing surface is defined as a 3 mm thick black disc with a diameter of 77 cm.
7.3. A white band is on the outside of the black area and has a width of 2.5 cm.
7.4. A 3.5% tolerance is allowed in the construction of the contest surface.
7.5. There is a safe space outside the ring. This space can be any color, it can be of any material and can have any shape. This area with the ring at its center will be called the ring area.
8. Conduct of the contest
8.1. Robots will be divided into groups according to the number of participants. The competition will take place in the group / quarter / semifinal / final system to allow as many rounds of play as possible for each robot.
8.2. Each match takes place in the best of 3 rounds and will be supervised by 2 referees (1 main referee and 1 assistant), except for the finals where the match is played in the best of 5 rounds. The decisions of the referees must be unanimous and are final, and their challenge leads to disqualification from the match.
8.3. During the contest a team is entitled to 2 interruptions for reprogramming during matches, 5 minutes each (2 interruptions in the contest).
8.4. Other breaks are only allowed for mechanical problems and only with the referee's agreement of maximum 5 minutes each. This rule is applied only when a match is taking place. Besides matches, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the match.
8.5. After approval all teams remain in the competition room / area. Teams can only leave the room / area for repairs. If a team leaves the competition room, it must return within the specified time by the referee. If the robot does not appear on the first call, it loses the match.
9. Playing the match
9.1. Robot start position. At the instructions of the referees, the two teams approach the ring to place the robots on the contest surface. A cross with two opposite arrows placed in the middle divides the sumo ring into four quadrants. Robots must always be placed in two opposite dials according to Figure 2. After the robots have been positioned, the cross is removed, the moment the robots can not be moved.
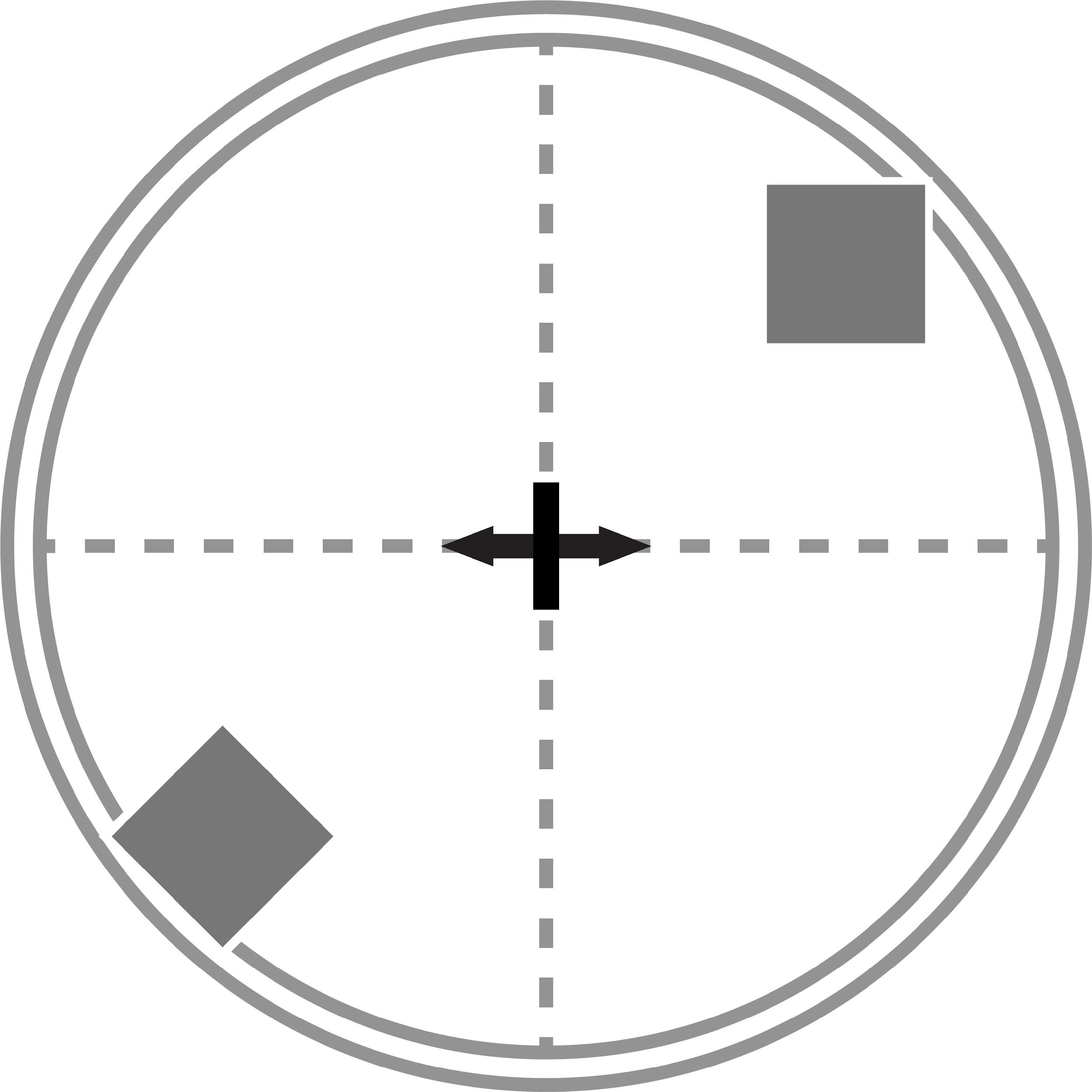
Figure 2. Placing the robots on the battle ring.
9.2. The Start, Stop, Interruption or Continuation of the match is announced by the referee.
9.3. A match will be played for a maximum of 3 minutes. It will begin and end at the referee's command.
9.4. The start is given by the referee in each round by means of a remote that sends a signal to the robots, who in turn will leave immediately without delay.
9.5. End of the match. When the referee announces the end of the match, the two teams are allowed to lift the robots from the ring.
9.6. A match consists of 3 rounds, each of which lasts for a maximum of 3 minutes, with the possibility of time extension by the referees.
9.7. Extension: an additional match, if requested by the referee, will take up to 3 minutes.
9.8. A team receives a "Yuhkoh" point when they win a round.
9.9. The first team that wins two rounds or receives the first two points "Yuhkoh" until the end of the time limit will win the match.
9.10. If the time limit is reached before a team receives two "Yuhkoh" points the team with the most points will win the match. (for example 1-0 points out of 3 matches).
9.11. If a match is not won by any team during the limit, an additional round will be played. After all options have been exhausted, the winner of the match may be decided by referees by drawing lots or other criteria set by the arbitration panel.
9.12. If one of the two robots does not start, a restart will occur. If the rest of the robot does not leave, the match will be won by the moving robot.
10. The score
10.1. One "Yuhkoh" point will be awarded when:
A. The robot of a team forces the opponent to come out of the ring by pushing or lifting maneuvers. The adverse robot is considered defeated if it touches with any part or component the outer surface on which the ring is placed.
B. The adverse robot comes out of the ring for whatever reason.
C. The adverse robot fails without continuing the round and the team's representative announces this.
10.2. When determining the winner falls to the arbitrators, after exhausting the LEGO Sumo competition criteria, the following considerations are considered:
A. Quality of robot construction and programming.
B. Penalty points accumulated during the match.
C. Team attitude during the match.
10.3. The match is stopped and the round is redone when:
A. Robots spin around each other without visible progress for 10 seconds. Robots are blocked for more than 3 seconds. If it is not clear that the robot is making progress, the observation time can be extended up to 30 seconds.
B. Both robots move without making any progress, stop (at the same time), or stop for 10 seconds without touching. However, if a robot stops moving, after 10 seconds, it will be declared without a fight initiative. In this case the opponent will receive a "Yuhkoh" point.
C. If both robots touch at the same time the outer surface on which the ring is placed and it can not be determined which robot has touched the first exterior, the round will be replayed.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a match, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the match is won by the opposing robot and the defective robot team can continue the repairs until the next match in which they participate and in that case being supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the match when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. Failure to continue a match. When the game can no longer continue due to injury of the competitor or damage to the robot, the competitor who caused the injury or robot's damage or failure will lose the match. The only robot to robot damage is permitted during official matches. If one can not decide who is to blame, the one who will ask for the match to be stopped will be declared defeated.
12. Player Restrictions
12.1. When teams are called to the dohyo for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Only one team member may enter the match area to place and take the robot of the dohyo.
13. Judging
13.1. No objections shall be declared against the referees / judges' decisions.
13.2. The lead person of a team can present objections to the organizing committee, before the match is over, if there are any doubts in the exercising of these rules. If there are no Committee members present, the objection can be presented to the judge before the match is over.
14. Championship
The Champion will be the robot with the most "Yuhkoh" points won.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
Basic principle are based on the robot sumo rules but construction of the robot may only be comprised of official Lego parts. This category is meant for young robotics enthusiasts that want to compete with other participants at a beginner level. The age limit for this category is 16 years.
General specifications
The goal of the LEGO Sumo category is to make a Sumo robot using Lego Mindstorms devices (RCX, NXT, EV3 or Spike Prime).
Under the rules of the game, teams will compete on a Dohyo (sumo ring) with an autonomous robot, it’s own construction according to the specifications in the regulations.
1. Notification
We realize that there are many variations to the rules for LEGO Sumo Robot; the official Robotics Championship rules posted on the website will be used for this competition and we ask that participants to read and be familiar with this particular rule set at the time of the competition, in order to avoid surprises.
2. Team
2.1. A “team” is composed of one to five students who have built a robot for this event. Each team should also have one adult present with the team. One adult can represent multiple teams if they wish.
2.2. The robot must be an autonomous robot constructed by themselves prior to the competition to the specifications below. This robot category is not a workshop where you may build robots after arrival. There will be limited time for adjustments and changes to the robots and their programming during the event.
2.3. Each team / robot will receive a check-in number and should have a unique name or identity to be easily recognizable by spectators and officials when they are on the field and when they score.
2.4. Each team/robot will be assigned a number on check-in and should have a unique name or identity to be easily recognized by spectators and officials when on the field and when scoring.
2.5. Matches will take place between two teams that have built a robot for this category. During the battles, only one member can approach the ring, the other team members must follow the match from the public.
3. Robot Construction
3.1. The racing robot may only be composed of official Lego parts (for example LEGO Mindstorm kits based on RCX, NXT, EV3 or Spike Prime) , which cannot be held together by any means other than the standard Lego construction methods (no tape, glue, stickers, etc.). No homemade sensors, multiplexers, or modifications to Lego elements are allowed. No modification to Lego parts by gluing, cutting or melting is allowed.
3.2. TWO motors with rotation sensors are allowed, and any other sensors manufactured by Lego may be used. No “made for Lego” third party sensors are permitted for this tournament.
3.4. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of registration, and once check-in takes place, the robot or its programming may no longer be modified. Robot battery should also be sufficiently charged once the robot is checked in.
3.5. The robot must be able to start using the official LEGO IR remote control, as shown in Figure 1, or via a Bluetooth connection. Start and stop commands are only performed by the referee. Other functions other than starting and stopping controlled via the Bluetooth connection are forbidden and the robot code may be inspected by the referee at any moment during the competition.
3.6. It is encouraged that robots be decorated or themed with Lego parts.
Figure 1. LEGO IR remote control.
4. Robot limitations
4.1. When started on the Dohyo, the robot can’t be more than 15.3x15.3 cm.
4.2. Height is not restricted.
4.3. The maximum mass of the robot shall not exceed 1,505 kg.
4.4. When the referee sends a start/stop signal, the robot must act accordingly.
4.5. The startup robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Components with a mass of less than 5 grams will not result in loss of the match.
4.6. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown to the opponent.
4.7. Devices that throw objects to the opponent are not allowed.
4.7. Sticky substances to improve traction are not allowed. Wheels and other components of the robot that are in contact with the ring should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be screened at the approval stage and may be rechecked at the referee's request at any time during the competition.
4.8. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.9. Robots who will not follow these rules will be disqualified.
4.10. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
4.11. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect.
5. Programming
5.1. The robot must be autonomous. Bluetooth or other wireless control of the robot on the field is forbidden with the exception of the communication start/stop command.
5.2 All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the competition. Each team will have to pass the technical inspection stage in order to be able to participate with the robot in the competition. After approval, all teams will necessarily remain in the competition room or area.
The stages of the technical approval process are:
6.1. Verify the size of the robot by placing a 15.3 x 15.3 cm.
6.2. Weigh the robot on a digital scale. The maximum value of the scales shall be 1.505 kg.
6.3. The wheels of the robot and other parts that are in contact with the track must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.4. Check the operation of the IR sensor or Bluetooth function for both when starting and stopping the robot.
6.5. The robot will no longer be retained after approval.
7. Dohyo (ring of sumo)
7.1. The inside of the ring is defined as the surrounding black area, but also includes the white line. Any surface outside the ring will be called the outside of the ring.
7.2. The playing surface is defined as a 3 mm thick black disc with a diameter of 77 cm.
7.3. A white band is on the outside of the black area and has a width of 2.5 cm.
7.4. A 3.5% tolerance is allowed in the construction of the contest surface.
7.5. There is a safe space outside the ring. This space can be any color, it can be of any material and can have any shape. This area with the ring at its center will be called the ring area.
8. Conduct of the contest
8.1. Robots will be divided into groups according to the number of participants. The competition will take place in the group / quarter / semifinal / final system to allow as many rounds of play as possible for each robot.
8.2. Each match takes place in the best of 3 rounds and will be supervised by 2 referees (1 main referee and 1 assistant), except for the finals where the match is played in the best of 5 rounds. The decisions of the referees must be unanimous and are final, and their challenge leads to disqualification from the match.
8.3. During the contest a team is entitled to 2 interruptions for reprogramming during matches, 5 minutes each (2 interruptions in the contest).
8.4. Other breaks are only allowed for mechanical problems and only with the referee's agreement of maximum 5 minutes each. This rule is applied only when a match is taking place. Besides matches, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the match.
8.5. After approval all teams remain in the competition room / area. Teams can only leave the room / area for repairs. If a team leaves the competition room, it must return within the specified time by the referee. If the robot does not appear on the first call, it loses the match.
9. Playing the match
9.1. Robot start position. At the instructions of the referees, the two teams approach the ring to place the robots on the contest surface. A cross with two opposite arrows placed in the middle divides the sumo ring into four quadrants. Robots must always be placed in two opposite dials according to Figure 2. After the robots have been positioned, the cross is removed, the moment the robots can not be moved.
Figure 2. Placing the robots on the battle ring.
9.2. The Start, Stop, Interruption or Continuation of the match is announced by the referee.
9.3. A match will be played for a maximum of 3 minutes. It will begin and end at the referee's command.
9.4. The start is given by the referee in each round by means of a remote that sends a signal to the robots, who in turn will leave immediately without delay.
9.5. End of the match. When the referee announces the end of the match, the two teams are allowed to lift the robots from the ring.
9.6. A match consists of 3 rounds, each of which lasts for a maximum of 3 minutes, with the possibility of time extension by the referees.
9.7. Extension: an additional match, if requested by the referee, will take up to 3 minutes.
9.8. A team receives a "Yuhkoh" point when they win a round.
9.9. The first team that wins two rounds or receives the first two points "Yuhkoh" until the end of the time limit will win the match.
9.10. If the time limit is reached before a team receives two "Yuhkoh" points the team with the most points will win the match. (for example 1-0 points out of 3 matches).
9.11. If a match is not won by any team during the limit, an additional round will be played. After all options have been exhausted, the winner of the match may be decided by referees by drawing lots or other criteria set by the arbitration panel.
9.12. If one of the two robots does not start, a restart will occur. If the rest of the robot does not leave, the match will be won by the moving robot.
10. The score
10.1. One "Yuhkoh" point will be awarded when:
A. The robot of a team forces the opponent to come out of the ring by pushing or lifting maneuvers. The adverse robot is considered defeated if it touches with any part or component the outer surface on which the ring is placed.
B. The adverse robot comes out of the ring for whatever reason.
C. The adverse robot fails without continuing the round and the team's representative announces this.
10.2. When determining the winner falls to the arbitrators, after exhausting the LEGO Sumo competition criteria, the following considerations are considered:
A. Quality of robot construction and programming.
B. Penalty points accumulated during the match.
C. Team attitude during the match.
10.3. The match is stopped and the round is redone when:
A. Robots spin around each other without visible progress for 10 seconds. Robots are blocked for more than 3 seconds. If it is not clear that the robot is making progress, the observation time can be extended up to 30 seconds.
B. Both robots move without making any progress, stop (at the same time), or stop for 10 seconds without touching. However, if a robot stops moving, after 10 seconds, it will be declared without a fight initiative. In this case the opponent will receive a "Yuhkoh" point.
C. If both robots touch at the same time the outer surface on which the ring is placed and it can not be determined which robot has touched the first exterior, the round will be replayed.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a match, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the match is won by the opposing robot and the defective robot team can continue the repairs until the next match in which they participate and in that case being supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the match when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. Failure to continue a match. When the game can no longer continue due to injury of the competitor or damage to the robot, the competitor who caused the injury or robot's damage or failure will lose the match. The only robot to robot damage is permitted during official matches. If one can not decide who is to blame, the one who will ask for the match to be stopped will be declared defeated.
12. Player Restrictions
12.1. When teams are called to the dohyo for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Only one team member may enter the match area to place and take the robot of the dohyo.
13. Judging
13.1. No objections shall be declared against the referees / judges' decisions.
13.2. The lead person of a team can present objections to the organizing committee, before the match is over, if there are any doubts in the exercising of these rules. If there are no Committee members present, the objection can be presented to the judge before the match is over.
14. Championship
The Champion will be the robot with the most "Yuhkoh" points won.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
Figure 2. Placing the robots on the battle ring.
- Detalii
- Regulamente
- Accesări: 507
The robot must be a two legged walking humanoid biped that must shift its center of gravity to maintain its balance when walking.
The Humanoid robots must be within the 3 kg weight limit. The robot should fit in a square with the side length of 20 cm (200 mm), maximum height for the robot 50 cm. The humanoid robot must be fully autonomous on the Challenge Area. There is no age limit for Humanoid Challenge.
1.General information
The purpose of this category is to appreciate the best robot which completes in the following missions:
Stair navigation. Robots are judged by the speed of climbing a staircase without losing balance or falling.
Obstacle navigation. Robots are judged by the speed they are capable of traveling an obstacle track without collision, losing balance or falling.
Each attempt is performed with one team at a time, when prompted by the referee, each team having one or more members. During the attempt only two team members from each team may approach the mission area; The operator and the assistant will enter the game area, the other team members must watch from the audience.
The attempt starts at the referee's command. The attempt is over when the referee announces it. The referee determines the final time and if there are any penalties applied. After the attempt the operator and the assistant will go to the area designated for the preparation and wait for the next game.
2. Team
2.1. A “team” is composed of one to five participants who have built a robot for this event.
2.2. The humanoid robot must be an autonomous robot constructed by themselves prior to the competition to the specifications below. This robot category is not a workshop where you may build robots after arrival. There will be limited time for adjustments and changes to the robots and their programming during the event.
2.3. Each team/robot will be assigned a number on check-in and should have a unique name or identity to be easily recognized by spectators and officials when on the field and when scoring.
2.4. Teams will participate by attempts and will be timed by the referee.
2.5. One person can be the operator for a maximum of 2 robots.
3. Robot Construction
3.1. A robot must fit within a square with the side lengths of 20 cm (200 mm). Maximum height for the robot is 50 cm (500 mm).
3.2. The total mass of a robot at the start of a match must be under 3kg (3000g).
3.3. The robot must be a two legged walking humanoid biped that must shift its center of gravity to maintain its balance when walking.
3.4. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of registration, and once check-in takes place, the robot or its programming may no longer be modified. Robot battery should also be sufficiently charged once the robot is checked in.
3.5. Any type of electronics are permitted, there is no limitation to kits, module brand or home made components as long as they do not present safety risks.
3.6. All robots must be autonomous. Any control mechanisms can be employed, as long as all components are contained within the robot and the mechanism does not interact with an external control system (human, machine, or otherwise). The only exception being the start/stop command.
3.7. Any robot design is allowed, if not subject to the limitations of section 2.2.
4. Robot limitations
4.1. The robot can be started from a remote or from a button placed on the robot.
4.2. The robot must have 2 arms. Each arm extended length shall not exceed the extended leg length.
4.3. The robot must have a head.
4.4. When walking, one foot must lift off the floor, while the other foot is balancing the robot.
4.5. When walking, the foot that balances the robot must have a knee-joint angle greater than 90 degrees. At any point if this is not the case, the robot will not be considered walking.
4.6. The feet can be of any shape and form as long as all of the following are maintained:
A. The robot’s foot is defined as the part of the robot that is contacting the surface of the arena (ground).
B. The maximum length (size) of the foot must be less than 50% of the length of the extended robot’s leg. The leg length is defined as the distance between where the robot's foot touches the ground and the axis that connects the leg to the upper body of the robot.
C. The maximum length of the foot must be less than 20 cm (200 mm).
4.7. When a robot is standing or walking, a rectangular outline around the left and right foot shall not overlap.
4.8. The startup robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Accidentally detached components with a mass of less than 5 grams will not result in loss of the attempt.
4.9. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown to the opponent.
4.10. Sticky substances to improve traction are not allowed. Feet and other components of the robot that are in contact with the playing area should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be screened at the approval stage and may be rechecked at the referee's request at any time during the competition.
4.11. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.12. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect, are strictly forbidden.
4.13. Components of the robot that can destroy the playing area are not allowed .
4.14. Any devices that throw flames are not allowed.
4.15. Robots who will not follow these rules will be disqualified.
5. Programming
5.1. The robot must be autonomous.
5.2. The autonomous robot movements will have to resolve the tasks of the mission: climb stairs and navigate an obstacle track. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the competition. Each team will have to pass the technical inspection stage (homologation) in order to be able to participate with the robot in the competition. After approval, all teams will necessarily remain in the competition room.
The stages of the technical approval process are:
6.1. Verify the size of the robot by placing a 20.3 cm x 20.3 cm (203mm x 203mm) bottomless box/frame over the robot. The height of the robot will be measured maximum 50.3 cm (503 mm)
6.2. Weigh the robot on a digital scale. The maximum value of the scales shall be 3005 g.
6.3. Check the operation of the 5 second delay when starting.
6.4. The feet of the robot and other parts that are in contact with the playing area must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.5. It will be checked if the number exists on the outer casing of the robot.
6.6. The robot will no longer be retained after approval.
6.7. After approval the first 4 teams will remain in the waiting area, near the game area. The rest of the teams will return to the area assigned for them.
7. Conduct of the contest
7.1. During the contest a team is entitled to 2 interruptions for reprogramming during attempts, 5 minutes each (2 interruptions in the contest).
7.2. Other breaks are only allowed for mechanical problems and only with the referee's agreement of maximum 5 minutes each. This rule is applied only when a match is taking place. Besides matches, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the match.
7.3. After approval all teams remain in the competition area. Teams can only leave the room for repairs. If a team leaves the competition room, it must return within the specified time by the referee. If the robot does not appear on the first call, it loses the attempt.
7.4. The order of the robots in the groups will be made random, it will be made after the official opening of the competition, and will be available on the website for all the participants.
7.5. After the technical inspection the teams, which will follow at the start, will remain at the competition area, in the waiting area. The teams will leave this area only if the referee agrees, or only for repairs and they must return in the time set by the referee. If the team doesn’t return at the first call, they will lose the attempt.
7.6. Each team has the responsibility to follow the starting grid (schedule), displayed on the website and on the projector.
7.7. If a team is called to play and does not arrive in 5 minutes the robot is disqualified.
8. Missions
8.1. Stair navigation mission
A. Mission objective
The robots compete one after each other. Each robot must reach the top of the staircase as fast as possible climbing one stair at a time, using his legs. Touching the staircase with other parts is not permitted.
B. Course time
Time is measured from the start signal until the robot reaches the top of the staircase. The robot is deemed to have finished the mission when both its feet are in contact with the end of the staircase. The maximum time admitted to complete this mission is 5 minutes, at this time the robot position shall be noticed for scoring.
C. Timekeeping
Time must be measured with an electronic gate system or by a judge with a stopwatch , based on the availability of equipment. In either case the recorded time shall be final.
D. Autonomous control
Once the start signal has been given the robot must remain fully autonomous or it will be disqualified. The robot must be disconnected from any network during the mission to prevent outside intervention.
E. Interruptions
- If a robot falls off the staircase it gets a second chance to complete the attempt. The robot will be placed at the first step.
- If a robot falls off the staircase or gets stuck because of various reasons (low battery, hot motor, script error, etc.) it gets a second chance to complete the attempt. A time interval up to 10 minute shall be granted to solve the problem before the retry. The robot will be placed at the first step when the restart will occur. In case of restart, the best attempt shall be considered for scoring.
- If a team refuses the second chance or the robot cannot be fixed in the given interval, the first attempt shall be considered for scoring.
8.2. Obstacle navigation mission
The robots will compete one after the other. The aim of the game is that a robot who walks on two legs must complete a course with obstacles in the shortest time.
A. The time in which the robots are allowed to finish the course is 5 minutes.
B. Each robot has in total 3 attempts. The attempts are distributed in 3 different time slots, each slot has a 5 minutes time limit. In each slot a robot has the right to make only one attempt to finish the course.
C. If one robot will not come to make his attempt in one slot, he loses the right to do it. Two attempts in one slot are not allowed.
D. Depending on the number of competitors the time can be extended or reduced.
E. One attempt has a time limit of 5 minutes to be completed. If the robot gets stuck, one restart is allowed. The robot will have to restart from the start position.
F. If the robot doesn’t finish the course in 5 minutes it will be stopped and the distance covered will be recorded.
G. The final classification will be made taking in consideration the best time for each robot.
H. No objections shall be declared against the judges' decisions. If there are any objections the team can be disqualified from that match.
I. Each team has the responsibility to follow the starting grid (schedule), displayed on the website and in the teams area.
9. Playing the trial
9.1. The Robot’s initial position. At the instructions of the referees, the team approaches the track to place the robot on the track surface.
9.2. The Start, Stop, Interruption or Continuation of the trial is announced by the referee.
9.4. The start is ordered by the referee in each round. After the start is announced the robot must start immediately without delay.
9.5. If the participant can’t start within 5 counts from the referee's signal, it will be declared as ‘Miss Start’ and they have two more chances to restart for this missed start.
9.6. If the participant starts the robot before the referee’s signal, it is declared as ‘False start’ and they have only one more chance to restart.
9.7. Each team has the right for two restarts in total per attempt.
9.8. A trial will be played for a maximum of 5 minutes. It will begin at the referee's command. Robots that couldn’t complete the missions within minutes, will have all points earned within 5 minutes aggregated as the final score for that attempt.
9.9. If the participant completes the mission within the time limit, the attempt will be finished and the time and points will be registered.
9.10. If the robot doesn’t move, the referee will count 10 seconds and if the robot still can not move, will call it a stop and count the points participants earned until the robot stopped.
9.11. During the trial, the referee can declare a TKO (Technical knockout) without 10 counts when the referee judges that the robot can’t drive properly anymore. (Ex. robot had been stopped over the structure and obstacle, robot drive settled zone repeatedly)
10. The score
10.1 A participant scores points according to the number of successes. The points per each mission will be announced on the competition day via the mission specification paper.
10.2. Ranking is done taking into account factors such as Mission points, time record, penalties and so on.
10.3. Time record is based on the measuring instruments or referee’s timer. (If you are declared as TKO or Robot stop by the referee, the time record will not be accepted as the final score.)
10.4. The final score considered will be the best score out of the 1st, 2nd and 3rd attempt.
10.5. The standard of the scoring system is based on quantitative standards: timekeeping and distance record.
10.6. Order of priority according to attempts If the result is the same, the winner will be decided after comparing the result of other attempts.
10.7. For the stair-climbing mission the robot who will reach the end of the staircase in the allowed time, will receive 10 points. The rest of the robots will be ranked depending on which step they arrive on the staircase. If more robots stop on the same step they will be ordered using the time when the robot is considered stopped by the referee. The minimum amount of points obtained in this challenge shall be no lower than 1 point.
10.8 For the obstacle navigation mission the robot that will finish the course and will have the best time, will receive 10 points. The rest of the robots will be ranked using the time and the position on the course. If more robots stop in the same place they will be ordered using the time when the robot is considered stopped by the referee.
The minimum amount of points obtained in this challenge shall be no lower than 1 point.
10.9. The final ranking is made by summing the points from all challenges for each robot. The robot with the biggest number of points wins the competition.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a match, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the attempt is lost. The defective robot team can continue the repairs until the next attempt in which they participate. During this time the team is supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the attempt when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. If there are any modifications made to the robot after technical inspection, the robot must again pass the technical inspection stage.
12. Player Restrictions
12.1. When teams are called to the mission area for their robot, teams present to the field promptly.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Two team members may enter the mission area to place and take the robot.
12.4. The competitors are forbidden to enter the ring during the mission, unless the referee stops the attempt.
12.5. The competitors are forbidden from demanding to stop the attempt without appropriate reasons.
13. Judging
13.1. No objections shall be declared against the referees / judges' decisions.
13.2. The lead person of a team can present objections to the organizing committee, before the attempt is over, if there are any doubts in the exercising of these rules. If there are no Committee members present, the objection can be presented to the judge before the attempt is over.
13.3. The decisions of the referee must be unanimous and are final; questioning these decisions leads to disqualification.
14. The Winner
The Champion will be the robot with the most points achieved throughout the missions.
14.1 Obstacle Course, consists of the participating autonomous humanoid robots navigating through the course and the obstacles set up on it, the robots that finish the course entirely receive 10 points, in the other cases in which the robots do not finish the course, their progress will be evaluated based on their position and in case of a draw their time plus the 1 point for participation.
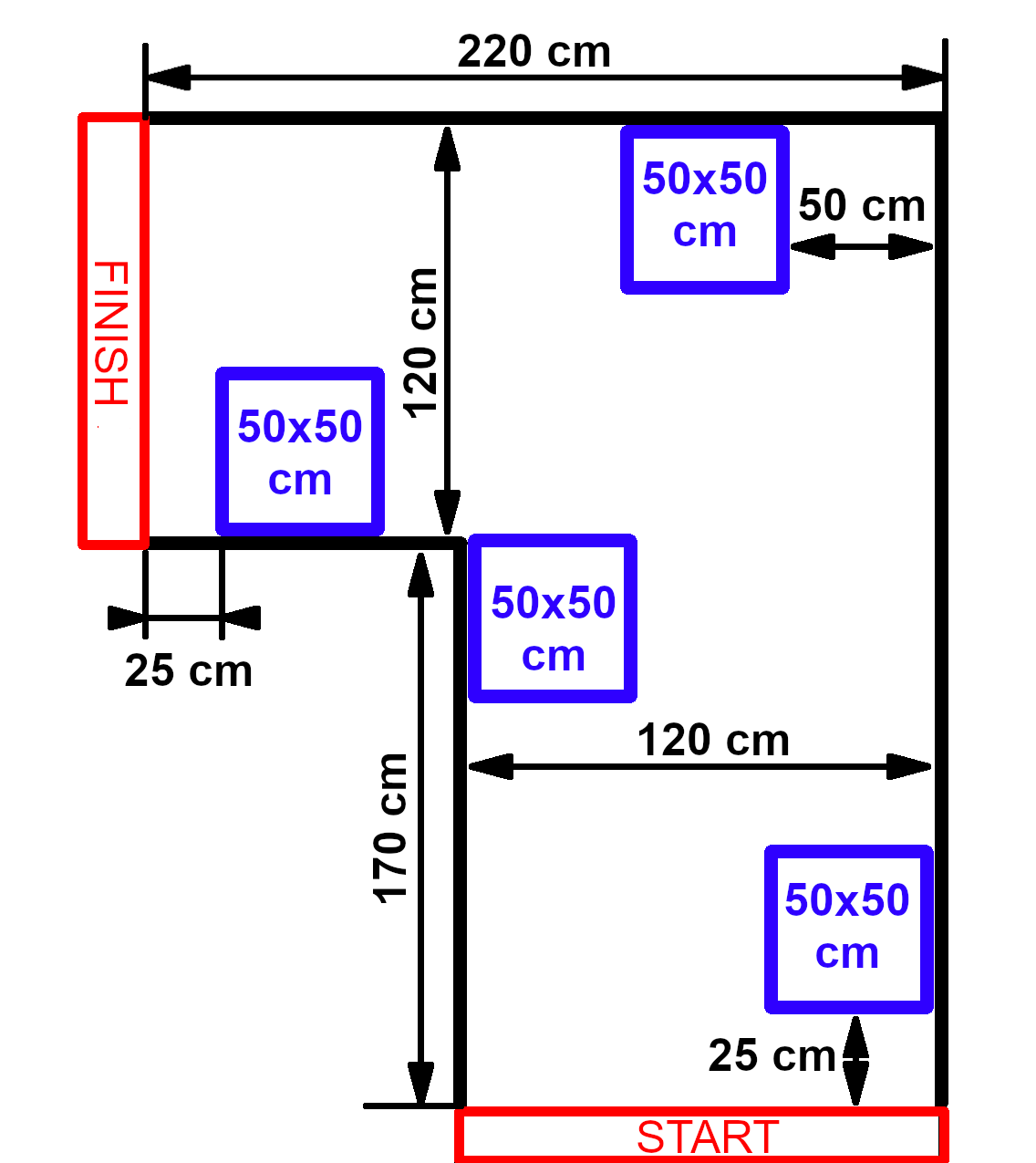
Fig. 1. Obstacle navigation mission
14.2 Stair navigation mission, consists of the participating autonomous humanoid robots reaching the end of the stair set up by the organizers, the robots which finish the course will receive 10 points, in the other cases in which the robots do not finish the course, their progress will be evaluated based on their position and in case of a draw their time plus the 1 point for participation.
Length…………...30cm
Width……………..25cm
Height …………...3cm
Additional information: The staircase has 4 steps up and 4 steps down.

Fig. 2 Stair navigation mission.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
- Detalii
- Regulamente
- Accesări: 1353
1. General
By registering in the competition you agree that Robotics Championship and our partners can use your data.Limitations on age are applied only for the Lego Sumo, Line Follower LEGO, Mission Challenge LEGO (16 years maximum). Children under 16, outside the city of Oradea, must be accompanied by at least one adult.
Line Follower Junior categories have age limit of 18 years old.
The competition will take place according to the date announced by the organizers via TV, press, radio or online. The organizers reserve the right to change the date of particular categories if they announce the contest participants through phone or e-mail in at least 5 days before the competition date. For example moving one category from day 1 to day 2.
The organizers will provide optimal conditions for each participant individually, providing participants agree to share workspace.
Each team registered can consist of maximum 5 members for any category exceptions from this rule are permitted only with the organizing teams approval and must be requested 3 weeks ahead of the competition.
2. What participants benefit from Robotics Championship
Accommodation (place to sleep) and T-shirts are provided to the first participants that pre-register / register, limited by our availability.You will be notified via email / phone if your team are among the first registered and will receive the benefits mentioned above.
Participants are obligated to fill out all requested information in the registration forms in order to be eligible for free accommodation and T-shirts.
Accommodation is provided starting from 9th of May till 11th of May 2024. If you need extra day you need to mention this at registration or as soon as possible via email to the organizing team.
Participants must present a valid identification document, ID card. Participants that come outside of the European Union must present a Passport as well.
Accommodation is assured at the University of Oradea student dormitories.
For the competition days will be 10th and 11th of May and testing day, 9th of May we provide food only for lunch and dinner.
If by any reason you can not attend you will announce your registration cancellation to the organizing team at least 10 days before the start of the event.
3. Robotics Championship Fair Play Standards (RCFPS)
We encourage a fair play between participants.We believe in giving each team equal chances at participating.
We do not allow teams to participate with identical robots. One team can not have multiple robots that are identical. Different, unrelated teams can have identical robots with the condition that they are made from a KIT (for example LEGO robots or Line Follower Turbo robots).
Sharing of equipment is encouraged as long as it is taken care of and handled respectfully with the owner's permission.
Team that sabotage intentionally other teams robots are disqualified and banned in future editions.
4. The flexibility of rules
The rules are flexible in that measure to allow adjustment to the number of participants and games.Modification or cancellation of rules can be decided by the local organizer of the event, as long as they are published before the event and are maintained throughout the event.
5. The power of decision of the referee.
For each event there will be 2 to 3 referees: one primary and secondary 1 or 2. The decisions shall be final and irrevocable.Referees may call an exception from the regulations when appropriate, with the obligation to inform participants about the modifications made.
The referees have the power to take decisions currently not covered by the Regulation if they facilitate fair game play.
Any complaints will be made to the project coordinator or vice-coordinators, NOT TO THE ORGANIZERS.
6. Responsibilities
Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
The organizers reserve the right to change the rules provided to announce the participants in at least 2 hours before a given category of the competition starts, only if the changes do not lead to changing the structure of the robot.
It is forbidden for participants to erase, modify or degrade the surface of the game arena. Organizers have the right to modify, repair or clean the surface of the arena in between matches.
7. Misconduct
A. Insults:If a participant addresses to the opponents or referees insulting words, or there is a robot with audio devices mounted to address insulting words or writing offensive words and gestures on the robot body, it may be penalized.
B. Offences:
Part of the competitor's body is on the playing area during the tests.
If foreign objects are placed on the playing surfaces without the referee’s knowledge.
If a team member asks a sample off course without a good reason.
Do not comply with the referee’s decisions.
C. Stealing
Teams that engage in any form of stealing will be disqualified and banned in future editions.
8. Penalties
Each deviation accumulates. At 3 misconduct team / participant is disqualified from the competition for the current edition.9. Liabilities
The organizers are not liable for incidents after which the robot is no longer functional.Each participant must ensure that the robot is safe both during the tests and after.
The organizers do not assume any liability for loss, theft or destruction of the possessions of the participants.
If a participant damaged an object or piece of equipment in the competition zone, he will pay the equivalent of the object and the coordinators may or may not disqualified the team responsible depending on the case.
The organizers are not responsible for the material used as a boundary for the safe zone.



