| - The line shall be black, 15 mm wide. There may be crossovers (e.g. places where the line - crosses itself). | 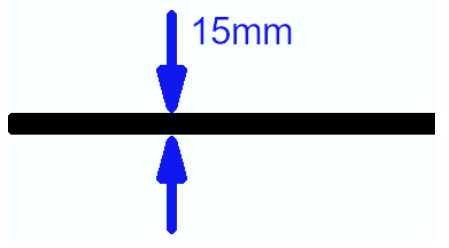 |
| - The closest approach of the line to the edges of the arena shall not be less than 15 cm, measured from the center of the line. | 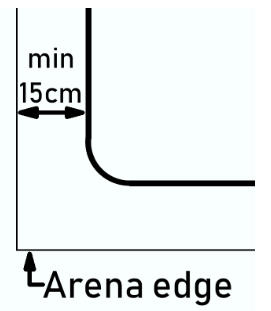 |
| - There shall be a start / finish line. | 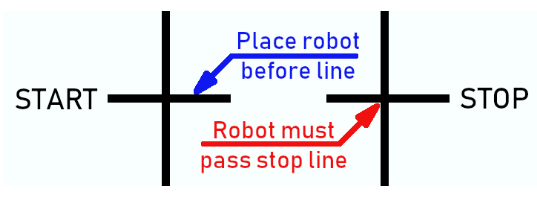 |
| - The minimal curve radius is 7.5 cm. | 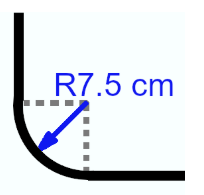 |
1. Technical inspection
Before the competition, the robot must pass the technical inspection. For this, the maximum dimensions are 30x30cm and the maximum weight is 3kg. The wheels of the robot and other parts that are in contact with the track must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
We realize that there are many variations to the rules for LEGO Sumo Robot; the official Robotics Championship rules posted on the website will be used for this competition and we ask that participants to read and be familiar with this particular rule set at the time of the competition, in order to avoid surprises.
2. Team
2.1. A “team” is composed of one to five students who have built a robot for this event. Each team should also have one adult present with the team. One adult can represent multiple teams if they wish.
2.2. The robot must be an autonomous robot constructed by themselves prior to the competition to the specifications below. This event is not a workshop where you may build robots after arrival. There will be limited time for adjustments and changes to the robots and their programming during the event.
2.3. Only one team member may enter the racetrack area to start the robot; other team members may watch from outside the racetrack area.
2.4. Each team/robot will be assigned a number on check-in and should have a unique name or identity to be easily recognized by spectators and officials when on the field and when scoring.
3. Robot Construction
3.1. The racing robot may only be composed of official Lego parts (for example LEGO Mindstorm kits based on RCX, NXT, EV3 or Spike Prime), which cannot be held together by any means other than the standard Lego construction methods (no tape, glue, stickers, etc.). No homemade sensors, multiplexers, or modifications to Lego elements are allowed. No modification to Lego parts by gluing, cutting or melting is allowed.
3.2. TWO motors with rotation sensors are allowed, and any other sensors manufactured by Lego may be used. No “made for Lego” third party sensors are permitted for this tournament.
3.3. It is encouraged that robots be decorated or themed with Lego parts.
3.4. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of registration, and once check-in takes place, the robot or its programming may no longer be modified. Robot battery should also be sufficiently charged once the robot is checked in.
4. Robot Size
4.1. When started on the racetrack, the robot can’t be more than 25 x 25 cm.
4.2. Height is restricted to 18 cm.
5. Programming
5.1. A line-following program must control your robot’s motion, using one single downward facing light sensor or color sensor to follow a black line. One single line detection sensor is permitted. Use of multiple line detection sensors of any type will result in a 5 second penalty per extra sensor to the lap time. There are multiple examples of various types of line-following programs that can be found online or in books.
5.2. The robot must be autonomous. No Bluetooth or other wireless control of the robot on the field is permitted. If the LEGO programmable brick has integrated communication modules they will not be used during this competition. The referee may inspect the code at any moment during the competition.
6. Robot Restrictions
6.1. The robot is restricted from destructive action.
6.2. No intentional interference with the opponent robot or the opponent's track is allowed.
6.3. Judges will have the discretion to disqualify any robot whose strategy is deemed to be too dangerous.
7. Player Restrictions
7.1. When teams are called to the racetrack for their robot, teams present to the field promptly.
7.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
7.3. Only one team member may enter the racetrack area to start and follow the robot, and restart if needed.
8. Racetrack
8.1. For this race, the track will be on a white surface, with one inch (1”) black lines which will be separated by 25 cm or more at all points. The lines will have random and irregular curves from start to finish. The track will be a continuous loop with no intersecting lines.
8.2. The overall length of the track will be between 8 and 15 meters.
8.3. The area immediately around this ring, termed the “Racetrack Area”, will be marked with tape or cones. Only one player from each team may enter the racetrack area with the robot at the start of the match.
9. Start of Match
9.1. One player from each team will enter the racetrack area with the robot.
9.2. Upon the signal of the judge, the robot will be placed at the starting end on the track assigned by the referee, with wheels resting on the racetrack.
9.3. Upon the start command from the judge, the player will start the robot program, and then step back from the track. The player may follow their robot along the length of the track in order to quickly retrieve an errant robot. It will not be allowed for any player to step on the track itself at any time, or to kneel or crawl or otherwise be on top of the track.
10. Round
10.1. The robots must follow their line on the racetrack until the light/color sensor reaches the timing gate, and their time will be recorded. The robot may be immediately retrieved by the player once the robot has passed the timing gate.
10.3. If a robot leaves its line, it may be placed after the starting position and be restarted immediately, without waiting for a judge’s signal. The timer will continue to run including restarts on that leg. If the total time exceeds twice that of the slowest participant, the time for that lap will be recorded as twice the opponent's time for that lap.
11. Judging:
11.1. No objections shall be declared against the judges' decisions.
11.2. The lead person of a team can present objections to the Committee, before the match is over, if there are any doubts in the exercising of these rules. If there are no Committee members present, the objection can be presented to the judge before the match is over.
12. Championship:
The Champion will be the robot with the fastest (lowest) of all the laps / tries in any direction chosen by the participant.
13. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
14. Liability
14.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
14.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
1.1. This regulation governs the Robot Football (Humanoid) discipline within Robotics Championship International (RCI).
1.2. The discipline is intended for bipedal humanoid robots operated in a competitive match format.
1.3. Participation in the discipline implies full acceptance of:
this regulation,
the general Robotics Championship Terms and Conditions,
decisions of the organizing committee and referees.
1.4. In case of conflict between this regulation and general RC Terms and Conditions, the latter shall prevail.
For the purpose of this regulation, the following definitions apply:
2.1. Humanoid Robot – a bipedal robot that moves exclusively by alternating leg motion and is capable of self-balancing without external support.
2.2. Team – a group consisting of two humanoid robots and their associated pilots.
2.3. Pilot – a human operator providing control input to a robot.
2.4. Match – a competitive encounter between two teams conducted according to this regulation.
2.5. Referee – the official appointed by the organizer to supervise and enforce the rules of the match.
2.6. Neutral Restart – a referee-initiated restart of play following a deadlock or non-playable situation.
3.1. Each team shall consist of exactly two humanoid robots.
3.2. A maximum of two pilots is permitted per team.
3.3. No reserve or substitute robots are allowed.
3.4. Robots may change functional roles (e.g. attacker, defender) freely during the match.
3.5. Participants must be between 10 and 20 years old, in accordance with Robotics Championship Terms & Conditions.
4.1. Physical Limits: * Mass: Max 3000.0g.
Dimensions: Max 200mm x 200mm (Static footprint). Height Max 500mm.
Structure: Must have 2 legs, 2 arms, and 1 head. No wheels or auxiliary supports.
The use of wheels, tracks, sliding elements, rolling motion, or deliberate foot-dragging to simulate locomotion is prohibited.
Robots must be capable of standing up independently from a prone or supine position within 10 seconds. Failure to stand results in the robot being treated as a 'deadlock' or removed for a 30s penalty.
4.2. The Gait Requirement: * Locomotion must be bipedal. During a walking cycle, the swinging foot must completely clear the surface.
The Paper Test: The robot must take at least 3 consecutive steps over an 80g/m² sheet of paper without snagging, dragging, or crumpling it.
4.3. Connectivity & Power:
Allowed: 2.4GHz RC, Bluetooth, Console Gamepads (PS/Xbox).
Failsafe: Must cease all movement if signal is lost. Failsafe must stop motion within 1 second.
Liability: Connectivity is the Pilot's responsibility. If a signal drops (Bluetooth lag/interference), the match continues. The opponent may score on a "frozen" robot.
Battery: Must be safely secured. A "brown-out" or power loss is treated as a Slipdown.
4.4. Arms may be used solely for balance. Any intentional contact between the ball and a robot’s arms or hands is prohibited.Incidental contact where the ball strikes a stationary arm is not a foul.
4.5. All robots must pass technical inspection prior to competition.
The organizer may reject robots deemed unsafe or non-compliant.
4.6. Post-Inspection Non-Compliance: If a robot is found to be non-compliant after a match has started, the offending team will be immediately disqualified from that match and potentially the entire category.
The Result: The match will be recorded as a 3–0 loss for the non-compliant team (or their current score, whichever is worse).
No Rematches: To maintain the event schedule, rematches are not permitted. The compliant team simply receives the "Forfeit Win."
5.1. The field of play shall be a rectangular arena with walls.
5.2. Recommended dimensions:
Length: 2.4 m to 3.0 m
Width: 1.6 m to 2.0 m
Exact dimensions shall be announced by the organizer before the event.
5.3. The field shall include:
two goals, one at each end;
a clearly marked halfway line;
a center point for kick-off and neutral restarts.
5.4. A low wall shall surround the field to prevent the ball and robots from leaving the arena.
6.1. A match consists of:
two halves of 5 minutes each;
a halftime break of 2 minutes.
6.2. The match clock runs continuously.
6.3. The clock shall not be stopped for:
robot falls;
software failures;
mechanical damage;
battery depletion.
6.4. The referee may stop the match only in case of:
safety hazards;
arena failure;
external interference.
7.1. The official ball is a standard 60mm foam ball.
7.2. At kick-off:
the ball is placed at the center point;
all robots must be in their own half;
the ball must be kicked forward to start play.
7.3. After a goal, play restarts with a kick-off by the conceding team.
8.1. Goal
A goal is scored when the ball fully crosses the goal line between the goal posts.
8.2. Each goal is worth 10 points.
8.3. Dominance Points
a) If the ball remains entirely in the opponent’s half for 30 consecutive seconds, the attacking team is awarded 1 point.
b) The count is reset if the ball crosses the halfway line, a foul is called, a neutral restart is ordered, or a goal is scored.
8.4. Shot on Goal
A clear kick directed at the goal that strikes the goal structure or is blocked by the defending robot is awarded 2 points, at the referee’s discretion. A Shot on Goal is defined as a ball trajectory that would have entered the goal net if not for the intervention of a defending robot or the goal structure.
9.1. A robot may not trap, pin, or immobilize the ball for more than 5 seconds.
9.2. Trapping the ball under the body, between the legs, or against the wall beyond this time limit is prohibited.
9.3. Violation results in loss of possession or other sanction determined by the referee.
10.1. A deadlock occurs when:
robots are immobilized against each other; or
the ball cannot be played due to obstruction.
10.2. If a deadlock persists for approximately 10 seconds, the referee shall order a Neutral Restart.
10.3. For a Neutral Restart, the ball is placed at the nearest referee-designated restart position.
10.4. There are no throw-ins.
When the ball leaves the playable area, it is repositioned by the referee.
The following actions are prohibited:
a) Illegal Charging an opponent without first playing the ball;
b) deliberate toppling or attacking a robot during its recovery motion;
c) intentional hand or arm contact with the ball;
d) deliberate stalling or passive play;
e) pilot interference with referees or the field of play.
12.1. The referee may apply one or more of the following sanctions:
warning;
loss of possession;
temporary removal of a robot;
permanent removal of a robot for the remainder of the half.
12.2. Temporary removal (“Timeout”) duration is 30 seconds.
During a 30-second timeout, the robot must be physically removed from the field by a designated Team Handler and placed in a neutral zone. It may only return after the referee signals the end of the penalty.
12.3. In case of serious or repeated violations, the referee may:
award points to the opposing team;
terminate the match.
13.1. If the match ends with equal points:
a) a 2-minute Golden Goal period is played;
b) the first goal scored wins the match.
13.2. If no goal is scored, the referee shall determine the winner by a penalty shootout procedure announced before the event.
Procedure:
The Setup: The ball is placed on the Penalty Spot.
The Attacker: Starts at the Halfway Line.
The Goalie: Starts on the Goal Line.
The Action: On the whistle, the Attacker has 30 seconds to score. The Goalie can move anywhere within the Penalty Box.
Rounds: Each team takes 3 shots. If still tied, it goes to "Sudden Death" rounds.
14.1. The referee has full authority to interpret and enforce this regulation.
14.2. Referee decisions are final and not subject to appeal.
14.3. The referee may take any action necessary to preserve safety, fairness, and continuity of the competition.
15.1. Teams are fully responsible for the safety and integrity of their robots.
15.2. The organizer assumes no liability for damage to robots or equipment.
15.3. Unsafe robots may be excluded from the competition at any time.
16.1. The organizing committee reserves the right to:
clarify this regulation;
issue additional instructions consistent with it.
16.2. This regulation enters into force upon publication by Robotics Championship International.




![]()
or please give us a call!
![]()
Universitatea din Oradea